|
In this era of industrial automation, robots are used for handling various processes for precise and better quality of production. Choosing ideal motor for perfect robot is always a tough task while designing the robot especially for industries. Proper selection of electrical motors in industrial robots requires several parameters to take account for arm control, position, angular and linear movements.
There are many motor available in the market but selection of the motor is the important criteria for the proper functioning of the robot Basic criteria for the selection of the motor are its application in industry. Motors used in Industrial Robotics are Alternating Current (AC) Motors Direct-Current (DC) Motors Servo Motors Hybrid Stepper Motors for robotics. 1. AC motor can be further subdivided into asynchronous and synchronous types. For example, an induction AC motor is an asynchronous type unit that is essentially comprised of a wire-wound stator and a rotor. Power is connected to the wire and AC current flowing through it induces an electromagnetic (EM) field in the coiled wire, with a strong-enough field providing the force for rotor motion. Synchronous motors are constant-speed motors that operate in synchronism with AC line frequency and are commonly used where precise constant speed is required. 2. DC motors because of the ease of controlling speed and direction. They are capable of an infinite speed range, from full speed to zero, with a wide range of loads. Because DC motors feature a high ratio of torque to inertia, they can respond quickly to changes in control signals. A DC motor can be smoothly controlled to zero motion and instantly accelerated in the opposite direction without the need for complex power-switching circuitry. Permanent-magnet brushless DC motors are usually more expensive than brush types, although they can provide advantages in power consumption and reliability. Without a commutator, brushless motors can operate more efficiently and at higher speeds than conventional DC motors. Most brushless DC motors run on a trapezoidal AC waveform, but some of the motors operate with sine waves. Sine wave-driven brushless motors can achieve smooth operation a lower speeds with low torque ripple, making them ideal for grinding, coating, and other applications such as surface finishing. In case of Brushed DC motors, if you want your motor to rotate slower without losing power, you can use pulse width modulation (PWM). This basically means to switch the motor on and off very fast. This way, the motor rotates with a lower speed as if lower voltage would be applied without taking care of the power. Basically, the torque generated by a brushed DC motor is too small and the speed is too great to be useful. So, gear reductions are usually used to reduce speed and increase torque. 3. Servo motors are used in closed-loop systems with a digital controller. The controller sends velocity commands to a driver amplifier, which in turn feeds the servo motor. Some form of feedback device, such as a resolver or encoder, provides information on the servo motor’s position and speed. The resolver or encoder may be integrated with the motor or located remotely. Because of the closed-loop system, a servo motor can operate with a specific motion profile that is programmed into the controller. 4. Stepper motors can operate with or without feedback, with the rotation of the motor broken up into small angular steps. It is controlled by pulsed command signals, and can stop precisely at a commanded point without need for brakes or clutch assemblies. When power is removed, a permanent-magnet stepper motor generally remains in its last position. Multiple stepper motors can be maintained in synchronization by driving them from a common source. http://www.bigbubblers.com/forum/viewtopic.php?p=11568 https://trackthattravel.com/travelblog/1359
0 Comments
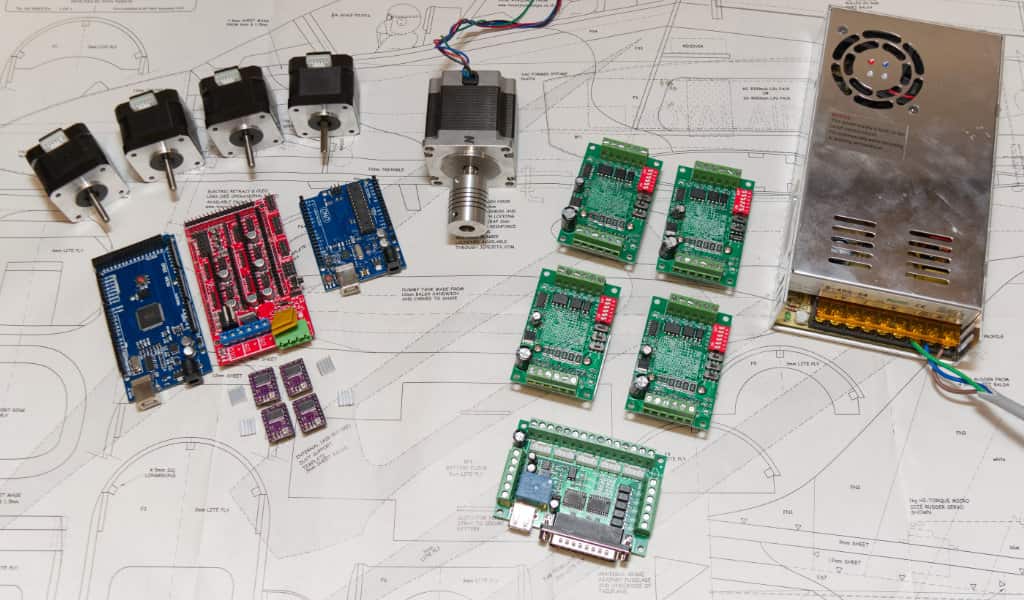 Click here tWhen we cut foam with a hot wire foam cutting machine it’s not actually being cut but melted. Its referred to as cutting by radiance. So the load on the steppers motors is virtually nothing from the hot wire if its temperature and feed rate are correct. Nearly all of the load comes from the weight of the moving parts of the machine. So NEMA17’s should be fine if your machine is not too heavy, something around 50-80 oz/in should be OK. Vortec RC uses NEMA17 on their kit. https://www.oyostepper.com/category-6-b0-Nema-17-Stepper-Motor.html FoamLinx offer several machines but these are not really aimed at hobbyist, costing several thousand dollars. However, we can see they are using NEMA23 rated at 220oz/in on their small machine. My current CNC foam cutter uses NEMA23 175oz/in rated at 2.8 Amps. The moving parts on my build weigh a little over 11KG or 25 lbs, so it’s a bit on the heavy side. It’s made from 3/4″ (18mm) High-Density FIbreBoad(HDF) which is very strong and stable but quite heavy. So I decided to use the bigger stepper motors with the recommended 24 Volt power supply. My updated design for 2019 which will use 12mm MDF and features several changes and improvements. It reduces weight considerably and allows the use of NEMA17 gearbox steppers. Keep checking back for the updated design should be out soon. https://reprap.org/forum/read.php?160,862796 As mentioned, nema 17 closed-loop stepper motor control with feedback for step-loss compensation uses algorithms to detect lost steps. The many different compensation algorithms used in industry have advantages and disadvantages:
These types of algorithms can be used in many point-to-point motion applications but are less useful for maintaining a profiled trajectory under varying load. This type of control suffers from the main weakness of traditional stepper motor control: Once pullout torque is exceeded, torque delivered to the load plummets to zero and a recovery algorithm must fix the problem. This control also suffers from the traditional problem of stepperresonance excitation. Algorithms abound to reduce the effects of stepper resonance but none completely eliminate the issue. Just like a traditional open-loop stepper, the motor can run hot because the control applies full current to the motor whenever it's in motion. Closed-loop stepper with load position control is similar to step-loss compensation as this drive scheme uses feedback and compensation algorithms to detect and address lost steps. This is a position-control scheme and dynamically controls and updates the output position when an error is present between commanded position and actual position. These compensation algorithms have advantages and disadvantages: The algorithms are especially useful when a profiled trajectory must be maintained under varying load. This type of control still suffers from the main weakness of traditional stepper motor control (that once pullout torque is exceeded the torque delivered to the load plummets). This type of control also suffers from the stepperresonance problem. Just like a traditional open-loop stepper, the motor can run hot because the control applies full current to the motor whenever it's in motion. It's usually easy to determine when a drive implements closed-loop stepper servo control because the drive can control torque. Case in point: The ElectroCraft PRO Series drives run steppers like high-pole-count brushless motors, via closed-loop stepper servo control. The ability to control torque has advantages and disadvantages: A wider variety of applications can use this type of control. In addition to point-to-point motion, the drive can execute profiled motion and coordinate axes. Machine builders can use the motor's full rated torque because this algorithm doesn't experience pullout issues; full torque is maintained up to the maximum limit. The drive can use the motor's full torque, but the system delivers only as much torque as is required at any point in time. This reduces motor heating associated with traditional stepper drives and other closed-loop controls. This control method completely eliminates the stepper resonance issue because the motor is no longer operated as a stepper. The ability to control motor current is a more complex control scheme and does not come free. Generally these types of systems are more expensive than step-loss compensation systems. Other hot product:pancake stepper motor nema 6 stepping motor 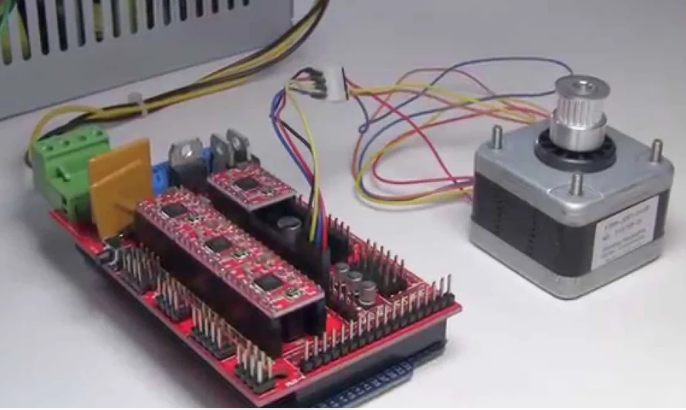 If you have a target travel speed for your printer, you can work out at least approximately what supply voltage you will need to the motor drivers. Here's how, with an example calculation: Stepper Motors Nema 42, Nema 52 - 130 x 130mm Decide on your target travel speed. For this example I will use 200mm/sec. From the target travel speed, work out the worst-case maximum belt speed. For a Cartesian printer, the worst case is a pure X or Y motion, so the worst case belt speed is the same as the travel speed. Work out the motor revs per second at the maximum belt speed, by dividing the belt speed by the belt tooth pitch (2mm for GT2 belts) and the number of teeth on the pulley. My delta uses 20-tooth pulleys so the maximum revs per second is 346/(2 * 20) = 8.7. Work out the peak back emf due to inductance. This is revs_per_second * pi * motor_current * motor_inductance * N/2 where N is the number of full steps per revolution (so 200 for 1.8deg motors, or 400 for 0.9deg motors). My motors are 0.9deg with 4.1mH inductance and I generally run them at 1A. So the back emf due to inductance is 8.7 * 3.142 * 1.0 * 4.1e-3 * 400/2 = 22.4V. Work out the approximate back emf due to rotation. From the formula given earlier, this is sqrt(2) * pi * rated_holding_torque * revs_per_second / rated_current. My motors have rated current of 1.68A and holding torque of 0.44Nm, so the result is 1.414 * 3.142 * 0.44 * 8.7/1.68 = 10.1V Preferably, the driver supply voltage should be at least the sum of these two back emfs, plus a few more volts. If you have two motors in series then the required voltage is doubled. A4988 Stepper Driver Module to Control Nema 17 motor How to use NEMA 34 Stepper Motor |
AuthorOyostepper has been specialized in stepper motor and driver for over 8 years. We endeavor to create the best place online for providing stepper motor, stepper motor driver and accessory products for companies and customers in different skill levels.Write something about yourself. No need to be fancy, just an overview. ArchivesNo Archives Categories |
 RSS Feed
RSS Feed
